Conflict-free joint decision by lag and zero-lag synchronization in laser network
- Select a language for the TTS:
- UK English Female
- UK English Male
- US English Female
- US English Male
- Australian Female
- Australian Male
- Language selected: (auto detect) - EN
Play all audios:

ABSTRACT With the end of Moore’s Law and the increasing demand for computing, photonic accelerators are garnering considerable attention. This is due to the physical characteristics of
light, such as high bandwidth and multiplicity, and the various synchronization phenomena that emerge in the realm of laser physics. These factors come into play as computer performance
approaches its limits. In this study, we explore the application of a laser network, acting as a photonic accelerator, to the competitive multi-armed bandit problem. In this context,
conflict avoidance is key to maximizing environmental rewards. We experimentally demonstrate cooperative decision-making using zero-lag and lag synchronization within a network of four
semiconductor lasers. Lag synchronization of chaos realizes effective decision-making and zero-lag synchronization is responsible for the realization of the collision avoidance function. We
experimentally verified a low collision rate and high reward in a fundamental 2-player, 2-slot scenario, and showed the scalability of this system. This system architecture opens up new
possibilities for intelligent functionalities in laser dynamics. SIMILAR CONTENT BEING VIEWED BY OTHERS SURPASSING THE CLASSICAL LIMIT IN MAGIC SQUARE GAME WITH DISTANT QUANTUM DOTS COUPLED
TO OPTICAL CAVITIES Article Open access 17 December 2020 ENTANGLED AND CORRELATED PHOTON MIXED STRATEGY FOR SOCIAL DECISION MAKING Article Open access 01 March 2021 CHAOTIC MICROCOMB-BASED
PARALLEL RANGING Article 20 July 2023 INTRODUCTION At the dawn of the 21st century, Moore’s Law1, which predicted consistent improvements in microprocessor performance, was nearing its
limit, prompting the exploration of new computing frameworks2,3. In particular, the demand for computational power has been increasing dramatically with the use of graphics processing units
(GPUs). As such, GPUs can be viewed as accelerators in computing. Photonic accelerators4 attempt to solve specific problems and take advantage of the high speed and multiplicity offered by
using light. In recent years, there have been many studies that apply optics to computational tasks found in photonic accelerators, such as matrix multiplication5,6, reservoir computing7,8,
neural networks9,10,11,12, neuromorphic computing13, reinforcement learning14,15, coherent Ising machines16, and decision-making17,18,19,20,21,22. Decision-making in the realm of the
multi-armed bandit (MAB) problem is a complex task. This problem, first described by Robbins in 195223, involves choosing from multiple slot machines, each with an unknown probability of
winning, with the aim of maximizing profit24. In this scenario, excessive exploration could result in missed opportunities for winning, while an over-reliance on prior results might lead to
the neglect of a potentially profitable machine. As such, successful decision-making requires a delicate balance between exploration and exploitation25,26. Several decision-making strategies
for the MAB problem have been demonstrated using photonic principles, leveraging technologies such as single photons17, chaotic laser18,27, and ring lasers28. The competitive multi-armed
bandit (CMAB) problem takes the MAB problem a step further by considering scenarios involving multiple players29. This problem encompasses a wide range of issues, including resource
competition scenarios like network connection problems30. As automation and mechanization continue to evolve and become more widespread, the significance of the CMAB problem grows
accordingly. In the MAB problem, effective exploration is needed, in addition to this, there is another consideration needs to be taken into account for reward maximization in the CMAB
problem. In CMAB scenarios, the rewards are divided due to conflicting choices, necessitating conflict-free, cooperative decision-making to optimize both individual and collective profits.
This cooperative decision-making has been demonstrated using entangled photons31,32,33, instead of single photons. In this implementation, the function of photodetectors, where photons are
observed, corresponds to slot machine selection. However, making decisions with constant sampling is challenging due to the randomness of photon emission, and executing these decisions
experimentally requires a stable environment. Hence, there is a growing need for a photonic accelerator that offers more flexible scalability and better experimental feasibility for
cooperative decision-making. Given the need for experimental feasibility, decision-making strategies utilizing chaotic lasers have been implemented using learning thresholds and temporal
waveforms produced by semiconductor lasers with feedback18. Chaotic laser systems, compared to single-photon systems, are more conducive to large-scale experiments with fiber optics, such as
physical random number generators34,35. However, decision-making using chaotic waveforms has been limited to the MAB problem and has not been explored for the CMAB problem. This approach
does not exploit the inherent properties of the physical system during exploration. This is because the exploration is carried out by simply adjusting a preset threshold, with no alterations
occurring in the optical system throughout this process. Therefore, we shifted our focus to the synchronization phenomena of chaotic lasers. Chaotic lasers not only generate rapid and
complex temporal waveforms but also exhibit synchronization phenomena. These synchronized behaviors have characteristics that are highly beneficial for decision-making. Various applications
leveraging this synchronization have been reported, including secure communication36, secure key distribution37, and reservoir computing7. We have numerically and experimentally implemented
a decision-making system using lag synchronization of chaos20,38,39. This approach expands the possibilities for practical applications of chaotic lasers in the realm of decision-making. The
key to this decision-making system is low-frequency fluctuation (LFF) dynamics40. The temporal waveform in LFF dynamics is characterized by rapid chaotic fluctuations on the order of GHz
and periodic fluctuation frequency on the order of MHz, which consists of a sudden dropout and a gradual recovery phase41. Thus, LFF embodies dynamics that possess both chaotic and periodic
properties. The lag synchronization of chaos refers to the phenomenon wherein one laser synchronizes with another laser, with a time delay equivalent to the propagation delay time, denoted
by \(\tau\). In this lag synchronization, a laser with an advanced oscillation is called the “leader”, while a laser that synchronizes with another laser is called the “laggard”.
Interestingly, this leader–laggard relationship in LFF dynamics spontaneously switches with a delay time \(\tau\)39. In the decision-making system based on LFF20, each slot was assigned to a
specific laser, and the player selected the slot corresponding to the leader laser. By switching the leader–laggard relationship and adjusting the leader probability by using coupling
strengths, effective exploration was achieved, and the winning machine was correctly identified. This decision-making principle is scalable to scenarios with a multitude of slot machine
options42. However, it is important to note that this system does not realize conflict-free joint decisions. To equip this system with the capability of conflict-free joint decision-making,
we shift our focus on another synchronous phenomenon known as zero-lag synchronization. This phenomenon occurs when the temporal waveforms of semiconductor lasers in a laser network
synchronize without any time delay42,43,44,45. For example, in a network with three mutually-coupled lasers arranged linearly, the two outer lasers synchronize with zero lag. Meanwhile, an
outer laser and an inner laser synchronize with a delay equal to the time required for light to propagate between the coupled lasers46. This phenomenon enables lasers that are physically
distant from each other to synchronize without delay. We expect to achieve a decision-making system that is capable of making conflict-free joint decisions using zero-lag synchronization. In
this study, we propose a cooperative decision-making scheme to address the CMAB problem by utilizing a laser network that exhibits both lag synchronization and zero-lag synchronization of
LFF dynamics. Similar to previous work20,42, decisions of each player in our system are made by leveraging the leader–laggard relationships in lasers. Initially, we propose a network for
cooperative decision-making and validate its effectiveness through numerical simulations. Subsequently, we implement this network experimentally and demonstrate cooperative decision-making
in action. In these sections, we investigate a basic scenario involving two players and two slot machines (2-player, 2-slot situation), and then we describe the expansion of the system and
examine the numerical performance of the expanded system. The innovative aspect of this study is realizing the avoidance of selection collision among players by exploiting zero-lag
synchronization. No physical conflict avoidance principle has ever been demonstrated to be so flexible and scalable, and it greatly expands the possibilities for decision-making with
photonics. RESULTS DECISION-MAKING METHOD AND NETWORK CONFIGURATION In this research, we focus on the CMAB problem, which involves multiple players selecting from multiple slots with unknown
hit probabilities in order to maximize their profit. Each slot is assumed to pay a constant reward of 1 according to static probability distributions. However, if multiple players choose
the same slot machine, the rewards are divided among them. Consequently, players must solve the CMAB problem using a certain scheme as the MAB problem while avoiding selection conflicts.
First, we consider the decision-making process for two players choosing between two slot machines. By examining this fundamental situation, we aim to demonstrate a new cooperative
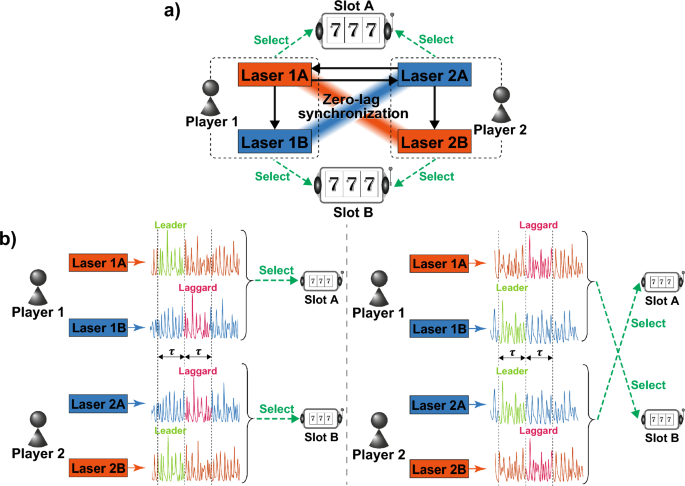
decision-making principle. We believe that this novel principle can be applied to a variety of problems. Figure 1a illustrates the principle of decision-making for a 2-player, 2-slot
situation using a laser network. In this system, Lasers 1A and 1B are assigned to Player 1, while Lasers 2A and 2B are assigned to Player 2. Players make decisions by utilizing the lag
synchronization of chaos in two lasers assigned to them. At the same time, Lasers 1A and 2A are assigned to Slot A, and Lasers 1B and 2B are assigned to Slot B. Based on the leader–laggard
relationship in lag synchronization of chaos, players select a slot corresponding to the leader laser among the lasers assigned to each of them. For instance, if Laser 1A becomes the leader
between Lasers 1A and 1B, Player 1 selects Slot A. Conversely, if Laser 2B becomes the leader between Lasers 2A and 2B, Player 2 selects Slot B. To achieve cooperative decision-making,
zero-lag synchronization in the laser network helps avoid selection collisions among players. The laser network in Fig. 1a comprises one set of two mutually-coupled lasers (Lasers 1A and 2A)
and two lasers injected from the mutually-coupled lasers (Lasers 1B and 2B). Lasers 1B and 2B are expected to synchronize with Lasers 2A and 1A, respectively, because Lasers 1B and 2B are
injected from Lasers 1A and 2A, respectively, similar to Lasers 2A and 1A. Theoretically, we can find clusters of lasers in the laser network that synchronize with zero-lag using an
adjacency matrix42,43. In general, each element in an adjacency matrix raised to the _n_-th power provides how many paths of length _n_ from the row to the column are there. In addition, by
applying the sign function to the power of the adjacency matrix of the laser network, each column in this matrix reveals light injection from itself or other lasers. The adjacency matrix of
laser network (_G_) in Fig. 1a is as follows: $$\begin{aligned} G=\begin{bmatrix} 0&{}1&{}1&{}0\\ 0&{}0&{}0&{}0\\ 1&{}0&{}0&{}1\\
0&{}0&{}0&{}0\\ \end{bmatrix}. \end{aligned}$$ (1) Each row and column of _G_ represents Laser 1A, 1B, 2A, and 2B in order. In this case, there are only two types of adjacency
matrix _G_ to any _n_-th power with the sign function applied as follows \((k\in {\mathbb {N}})\): $$\begin{aligned} {\textrm{sign}}(G^n)= {\left\{ \begin{array}{ll} \begin{bmatrix}
0&{}1&{}1&{}0\\ 0&{}0&{}0&{}0\\ 1&{}0&{}0&{}1\\ 0&{}0&{}0&{}0\\ \end{bmatrix} &{} (n=2k-1),\\ \begin{bmatrix} 1&{}0&{}0&{}1\\
0&{}0&{}0&{}0\\ 0&{}1&{}1&{}0\\ 0&{}0&{}0&{}0\\ \end{bmatrix}&(n=2k). \end{array}\right. } \end{aligned}$$ (2) From this result, Lasers 1A and 2B can
synchronize with zero-lag because the elements of the first and fourth columns are the same at any time. At the same time, Lasers 1B and 2A can synchronize with zero-lag because the elements
of the second and third columns are the same. Therefore, when Player 1 determines that Laser 1A is the leader, Player 2 is expected to determine that Laser 2B is the leader. Likewise, when
Player 1 determines that Laser 1B is the leader, Player 2 is expected to determine that Laser 2A is the leader. These clusters of zero-lag synchronization help to avoid selection conflicts,
as shown in Fig. 1b. NUMERICAL SIMULATIONS We numerically simulated the performance of this network and the cooperative decision-making. We modeled the behavior of coupled semiconductor
lasers using the Lang–Kobayashi equation as follows47 \((j=\textrm{1A, 1B, 2A, 2B})\): $$\begin{aligned} \frac{dE_{j}(t)}{dt}&=\frac{1+i\alpha }{2}\left[
\frac{G_N[N_{j}(t)-N_0]}{1+\epsilon |E_{j}(t)|^2}-\frac{1}{\tau _p}\right] E_{j}(t)+\kappa E_{g(j) }(t-\tau )\exp [i\theta _{j}(t)], \end{aligned}$$ (3) $$\begin{aligned}
\frac{dN_j(t)}{dt}&=J-\frac{N_j(t)}{\tau _s}-\frac{G_N[N_j(t)-N_0]}{1+\epsilon |E_j(t)|^2}|E_j(t)|^2, \end{aligned}$$ (4) $$\begin{aligned} \theta _j(t)&=(\omega _{g(j)}-\omega
_j)t-\omega _{g(j)}\tau , \end{aligned}$$ (5) where \(E_j(t)\), \(N_j(t)\), and \(\theta _j(t)\) are the complex electric-field amplitude, the carrier density, and the optical phase
difference between injected light and simplex oscillation light of Laser _j_, at time _t_, respectively. The second part of Eq. (3) is about the effect of injection light. Laser _g_(_j_)
injects light into Laser _j_. In this network, _g_(_j_) is configured as follows: $$\begin{aligned} g(j)= {\left\{ \begin{array}{ll} \textrm{2A} &{} (j=\textrm{1A}), \\ \textrm{1A}
&{} (j=\textrm{1B}), \\ \textrm{1A}&{}(j=\textrm{2A}), \\ \textrm{2A}&{}(j=\textrm{2B}). \end{array}\right. } \end{aligned}$$ (6) \(\kappa\) represents the coupling strength
between lasers, and \(\tau\) denotes the propagation delay times of an injection path. In this simulation, \(\kappa\) is set to 30 ns\(^{-1}\), and \(\tau\) is set to 5 ns. These factors are
critical in understanding synchronization delay and the period of leader–laggard switching, which are important quantities characterizing the system’s behavior. In this simulation, all
detuning at the initial optical frequency is set to 0 Hz to demonstrate the principle of conflict-free operation using the laser network. Other parameter values used are summarized in Table
1 in the Methods section. The temporal waveform of laser intensity \(I_j(t) = |E_j(t)|^2\) was calculated using the Lang–Kobayashi equation. Figure 2 displays the laser intensity \(I_j\),
low-pass-filtered intensity, and cross-correlation value between Laser 1A–2B and Laser 1A–1B. In Fig. 2a, all lasers exhibit chaotic oscillations, but the envelope components present
periodic temporal waveforms. We then examine the low-pass-filtered intensity, as shown in Fig. 2b. The low-pass filter is applied to extract periodic fluctuation on the order of MHz
excluding rapid chaotic fluctuation on the order of GHz. The cutoff frequency is set at 60 MHz. Filtered intensities for all lasers demonstrate dropout and gradual recovery, indicating that
the lasers oscillate due to LFFs. Furthermore, their temporal waveforms are strikingly similar. The cross-correlation value is defined as follows (with \(i,j\in \{\)1A, 1B, 2A, 2B\(\}\)):
$$\begin{aligned} {\hat{C}}_{i,j}(\tau )=\frac{\langle [I_{i}(t-\tau )-\bar{I}_{i}][I_{j}(t)-\bar{I}_{j}]\rangle _T}{\sigma _{i}\sigma _{j}}, \end{aligned}$$ (7) where \(I_i\) represents the
laser intensity of Laser _i_. Additionally, \(\langle \cdot \rangle _T\) denotes the average over the period \(T=\) 1000 ns. \({\bar{I}}_j\) and \(\sigma _j\) are the averaged \(I_j\) and
the standard deviation of \(I_j\) over the period _T_, respectively. In Fig. 2c, the cross-correlation value \({\hat{C}}_{1A,1B}\) between Lasers 1A and 1B exhibits peaks at − 5.02 ns and
5.02 ns, corresponding to the lag synchronization. Conversely, the cross-correlation value \({\hat{C}}_{1A,2B}\) between Lasers 1A and 2B has the peak at 0 s, as shown in Fig. 2d, meaning
that Lasers 1A and 2B are zero-lag synchronized. From these results, it is numerically shown that zero-lag synchronization occurs as intended. We also observe that Lasers 2A and 2B exhibit
lag synchronization of chaos, while Lasers 1B and 2A are in the zero-lag synchronization. Therefore, this laser network allows for the coexistence of lag synchronization chaos and zero-lag
synchronization. We focus on the leader–laggard relationship in the lag synchronization of chaos. The leader–laggard relationship is quantified using the short-term cross-correlation (STCC)
value as follows: $$\begin{aligned} C_{\textrm{1A}}(t)&=\frac{\langle [I_{\textrm{1B}}(t-\tau )-\bar{I}_{\textrm{1B}}][I_{\textrm{1A}}(t)-\bar{I}_{\textrm{1A}}]\rangle _\tau }{\sigma
_{\textrm{1A}}\sigma _{\textrm{1B}}}, \end{aligned}$$ (8) $$\begin{aligned} C_{\textrm{1B}}(t)&=\frac{\langle [I_{\textrm{1A}}(t-\tau
)-\bar{I}_{\textrm{1A}}][I_{\textrm{1B}}(t)-\bar{I}_{\textrm{1B}}]\rangle _\tau }{\sigma _{\textrm{1A}}\sigma _{\textrm{1B}}}, \end{aligned}$$ (9) $$\begin{aligned}
C_{\textrm{2A}}(t)&=\frac{\langle [I_{\textrm{2B}}(t-\tau )-\bar{I}_{\textrm{2B}}][I_{\textrm{2A}}(t)-\bar{I}_{\textrm{2A}}]\rangle _\tau }{\sigma _{\textrm{2A}}\sigma _{\textrm{2B}}},
\end{aligned}$$ (10) $$\begin{aligned} C_{\textrm{2B}}(t)&=\frac{\langle [I_{\textrm{2A}}(t-\tau )-\bar{I}_{\textrm{2A}}][I_{\textrm{2B}}(t)-\bar{I}_{\textrm{2B}}]\rangle _\tau }{\sigma
_{\textrm{2A}}\sigma _{\textrm{2B}}}, \end{aligned}$$ (11) where \(\langle \cdot \rangle _\tau\) denotes the short-term average over the period \(\tau\). \({\bar{I}}_j\) and \(\sigma _j\)
represent the averaged \(I_j\) and the standard deviation of \(I_j\) over the period \(\tau\), respectively. Note that the short-term cross-correlation value has time _t_ as a parameter,
rather than the delay time \(\tau\), which is used in the cross-correlation value. By employing STCC values, we can observe the changes in cross-correlation values between lasers assigned to
each player as a function of time. \(C_{\textrm{1A}}(t)\) represents the cross-correlation value when Laser 1A is considered as the laggard over the short-term period \(\tau\), while
\(C_{\textrm{1B}}(t)\) considers Laser 1B as the laggard. Consequently, at time _t_, if \(C_{\textrm{1A}}\) is smaller than \(C_{\textrm{1B}}\), Laser 1A is the leader and Laser 1B is the
laggard; the reverse is also true. Similarly, \(C_{2A}\) and \(C_{2B}\) reveal the relationships between Lasers 2A and 2B. Using this temporal waveform in Fig. 2a, we calculate the STCC
values and perform decision-making numerically. Figure 3 displays the STCC values and decision-making results. Comparing Figs. 2b and 3a, it can be observed that the LPF and STCC correspond
closely, particularly during the dropout and recovery processes. Figure 3b presents an enlarged view of Fig. 3a. Despite the one-way coupling between Lasers 1A and 1B, STCC values \(C_{1A}\)
and \(C_{1B}\) spontaneously switch every 5 ns, corresponding to the coupling delay time, as seen in lag synchronization of chaos. Moreover, STCC values \(C_{1A}\) and \(C_{1B}\) are the
same as \(C_{2B}\) and \(C_{2A}\), respectively, since each laser is synchronized with zero-lag (Laser 1A–2B and Laser 1B–2A). Decision-making is performed using the switching of these
correlation values. The entire STCC values obtained from the waveforms were used in chronological order. The sampling interval for players’ selecting slot machines is set to 1 ns, equivalent
to 1 play. We expect that the selection of each player will switch without selection conflict every 5 plays because the coupling delay time is set to 5 ns. The hit probabilities of Slots A
and B are set to 0.8 and 0.2, respectively. Since exploration is out of scope in this study, these hit probabilities are not very meaningful in terms of exploration. However, we set the
probabilities to such biased values to ensure that the selection switch occurs ideally and players select slots equally. We test the cooperative decision-making for 100 plays. We define 100
plays as one cycle and evaluate the average accumulated reward for 10 cycles. Figure 3c displays the averaged accumulated reward, while Fig. 3d displays the averaged decision conflict rate
over 10 cycles. In this problem, the team’s average theoretical maximum reward of 100 can be achieved if no selection conflict occurs. In Fig. 3c, the accumulated rewards of Players 1 and 2
are 50.4 and 50.3, and that of the team is 100.7. Also, no conflict occurs in 10 cycles, as shown in Fig. 3c. Thus, using this network, cooperative decision-making is successfully achieved,
and the reward for individuals and the team reaches the theoretical maximum reward. In addition, players are rewarded equally, even though the hit probabilities of slots are biased. This
equality is attained because the selections of players are constantly switched, providing equal opportunities for players to choose the best slot. The accumulated rewards are an average of
10 cycles, ensuring consistency in the number of cycles between the numerical simulation and experiment. so they are slightly different from the expected values, but by increasing the number
of cycles, the individual rewards are expected to converge to 50 and the team rewards to 100. EXPERIMENTAL RESULTS CONFLICT-FREE JOINT DECISION BY TWO PLAYERS We implement the experimental
setup for the 2-player, 2-slot situation as shown in Fig. 4 to confirm the experimental possibility of our system for this fundamental situation. We use four distributed-feedback
semiconductor lasers, referred to as Laser 1A, Laser 1B, Laser 2A, and Laser 2B (threshold injection current values are 11.0 mA, 11.7 mA, 11.8 mA, 11.8 mA, respectively). The light from each
laser is split into a network part and a detection part by a fiber coupler. In the detection part, the light is transferred to an electrical signal by a photoreceiver and sent to the
oscilloscope. In the network part, the four lasers are connected via unidirectional injection paths with optical isolators, fiber couplers, and optical circulators to configure the network
in Fig. 4. Each path is adjusted to have the same delay time of 75.37 ns. Circulators on the Laser 1B and 2B sides are inserted only to make all optical injection paths the same length. In
addition, a voltage-controlled variable attenuator is inserted to adjust the coupling strength \(\kappa\). \(\kappa _{i,j}\) is the coupling strength of the injection path from Laser _i_ to
Laser _j_. In order to achieve lag synchronization of chaos in the LFF dynamics, the injection current of each laser is set to about 1.1 times the threshold injection current, and the
temperature is set so that the peak wavelength is 1547.100 nm. In this network, mutually coupled Lasers 1A and 2A cause LFF dynamics. Lasers 1A and 2A are also transmitted to Lasers 1B and
2B, respectively, with the delay, Lasers 1A and 2B (1B and 2A) synchronize without delay. Therefore, the coupling strengths between Lasers 1A and 2A are set to \(\kappa _{1A,2A}=0.67\) and
\(\kappa _{2A,1A}=0.73\) to oscillate in LFF dynamics. On the other hand, the coupling strengths between Lasers 1B and 2B are set to \(\kappa _{1A,1B}\) and \(\kappa _{2A,2B}=1.0\) to
achieve the lag synchronization. Figure 5 displays the waveforms and cross-correlation (CC) values for the laser intensities in the experiment. Figure 5a shows the temporal waveforms,
showing that the lasers oscillate chaotically with the long periods. In this figure, Laser 1A (1B) is similar to Laser 2B (2A) in the range of small oscillation amplitudes. Figure 5b shows
the low-pass-filtered temporal waveforms. The cutoff frequency of the low-pass filter is 60 MHz. Comparing this with Fig. 5a, Laser 1A (1B) clearly synchronizes with Laser 2B (2A). Then, we
check the cross-correlation values of Lasers 1A–1B (Fig. 5c) and Lasers 1A–2B (Fig. 5d). In Fig. 5c, there are two peaks near 75.37 ns, corresponding to the propagation delay time of the
experimental setup. In fact, there are differences in the actual lengths of the injection paths, and the difference of the propagation delay time is within approximately 1 ns. To compensate
for these differences, the time positions of waveforms are adjusted using the oscilloscope’s deskew feature. Details of how the deskew is adjusted are described in previous research42.
Although the positions of peaks are adjusted near 75.37 ns, there are still a few differences between delays because of the resolution of the oscilloscope. In Fig. 5d, the CC value reaches
0.98 in the case of no delay. Then, Lasers 1A and 2B are regarded as achieving zero-lag synchronization. Using this temporal waveform in Fig. 5a, we calculate the STCC values and perform a
decision-making experiment. Figure 6a shows the STCC values. Unlike the case of numerical calculation, the switching between the STCC values occurs in the dropout part. However,
leader–laggard switching is crucial to achieve equal rewards among players and effective exploration. Thus, in the experimental system, we focus on regions near the dropout where switching
took place. As shown in Fig. 6a, dropout is determined based on STCC values. Decision-making begins when all of the STCC values \(C_{1A}\), \(C_{1B}\), \(C_{2A}\), and \(C_{2B}\) drop below
0.4 and stops when any one of the STCC values rises above 0.94. The decision-making is made every 15.06 ns, 10 cycles each consisting of 100 plays are performed, similar to the numerical
simulation. Since the propagation delay time is about five times the decision-making period, player selections are expected to switch every 5 plays. For this decision-making experiment, a
waveform of approximately 15 μs is needed. Figure 6b displays the selection of each player in one cycle, while Fig. 6c presents the averaged accumulated rewards of each player and the team.
Figure 6d demonstrates the averaged conflict rate between players in 10 cycles. In Fig. 6b, players mostly select different slot machines. Then, the accumulated rewards of Player 1, Player
2, and the team are 38.05, 57.75, and 95.8, respectively, and the average conflict rate is 0.085. We can see that the experimental results support the results of numerical simulations;
however, there is a selection conflict, and the reward is reduced accordingly. This is because the experiments include noise, and zero-lag synchronization is not perfectly achieved. Based on
these results, the cooperative decision-making system can successfully reduce the conflict rate and increase rewards for the players and the team numerically and experimentally.
DECISION-MAKING BY INDEPENDENT TWO-PLAYERS As a comparative experiment, the decision-making system is tested using two pairs of independently mutually coupled lasers, as shown in Fig. 7a,b.
Laser 1A–1B and Laser 2A–2B are mutually coupled independently through unidirectional injection paths. Player 1 is assigned Lasers 1A and 1B, while Player 2 is assigned Lasers 2A and 2B.
Lasers 1A and 2A are assigned to Slot A, and Lasers 1B and 2B are assigned to Slot B, similar to the system in Fig. 1a. This setup represents a situation where players make decisions
independently. As shown in Fig. 7b, each injection path is composed of circulators, a fiber coupler, an attenuator, and an isolator. The fiber couplers are inserted to match the injection
path lengths to the experimental setup in Fig. 4. The coupling strengths for the mutually coupled lasers, \(\kappa _{1A,1B}\), \(\kappa _{1B,1A}\), \(\kappa _{2A,2B}\), and \(\kappa
_{2B,2A}\) are set to 0.339, 0.97, 0.96, 0.67, respectively. In the comparative experiment with independent decision-making, the coupling strengths are set to generate LFF dynamics, and the
biased pairs of coupling strengths compensate for the differences in the characteristics of semiconductor lasers to achieve balanced leader probability for each laser. In this scenario, the
temporal waveforms in LFFs of the two lasers assigned to each player are synchronized with a delay equal to the propagation delay time, but there is no observed correlation between the
lasers assigned to Player 1 and those assigned to Player 2. Using the lag synchronization of chaos, the decision-making experiment is performed similarly to the previous cooperative
decision-making experiment. Figure 7c displays averaged accumulated rewards for each player and the team, and Fig. 7d presents the averaged conflict rate between players across 10 cycles.
The averaged accumulated rewards of Player 1, Player 2, and the team are 35.45, 44.25, and 79.7, respectively. The averaged conflict rate is 0.60. Comparing the results of the independent
decision-making system with those of the cooperative decision-making system, it becomes evident that the cooperative approach outperforms the independent one. In particular, zero-lag
synchronization functions as a conflict-free joint decision in the decision-making system. The cooperative decision-making system achieves a higher team reward and a significantly lower
conflict rate, highlighting its effectiveness in improving decision-making processes and outcomes. DISCUSSION PERFORMANCE AND STABILITY In these results, numerical and experimental results
are similar and are superior to the independent system. However, there is still a gap between the numerical and the experimental results of our decision-making system. First, perfect
conflict-free decision-making is not achieved in the experimental setup. Although the achieved conflict rate was 0 in the numerical simulation, the averaged conflict rate in the experimental
setup is about 8.5%. Second, perfect equality is not achieved in the experimental setup. It is difficult in the experiment to observe the ideal switching of the leader–laggard relationship
seen in a numerical simulation. In the experimental setup, the switching occurs only around dropout, and the leader probability is biased. Therefore, using the whole waveform similar to the
numerical simulation makes the reward of players biased. Even when we use near the dropout to try to achieve uniform selection switching, the averaged accumulated rewards of Player 1 and
Player 2 are 38.0 and 57.7, respectively, making it difficult to guarantee adequate equality. These deviations between the numerical and experimental results can be attributed to small
differences in parameters. In the numerical simulation, the internal parameters of lasers, the propagation delay time \(\tau\) of all injection paths and many other parameters comprising the
network are precisely the same. This matching of parameters makes the synchronous state more stable and the system performance more ideal. Allowing small differences in these parameters,
perfect conflict avoidance cannot be achieved, and a few conflicts may occur. The deterioration of the synchronization status can also make the lasers’ dynamics unstable. Some degree of
misalignment in the inner parameters of lasers can be compensated by adjusting the injection current and temperature of the lasers or the coupling strength of injection paths. In this study,
we adjusted the coupling strength, injection current, and initial optical frequencies of the lasers to improve synchronization and achieve an equal leader probability. However, the
parameter deviations were not completely filled. Especially, we suspect that the difference in \(\tau\) may be particularly significant. In other words, misalignment of \(\tau\) among
injection paths presumably works critically on the performance and stability of the system because the misalignment in \(\tau\) causes a misalignment of arriving light to the lasers that
should be synchronized. Then, using elaborate delay lines in the adjustment of \(\tau\), although this experiment is conducted with deskew, can improve performance and stability.
Additionally, other networks can achieve the same synchronous state as our network. For example, a four-laser network with connections between any adjacent pairs of lasers45 can
theoretically and numerically perform just as well as our network. However, it becomes increasingly challenging in the experiment to match the \(\tau\) of all injection couplings as the
number of coupling increases. Thus the number of injection couplings should be minimized. Our network has the minimum number of injection couplings. It can be expanded to situations with
more players or slots while maintaining the minimum number of injection couplings. SCALABILITY Our network can be expanded to accommodate more players and more slots. An adjacency matrix
corresponding to the situation that has the same number of players and slots (_n_ players and _n_ slots) is the \(n^2\times n^2\) matrix as shown below: $$\begin{aligned} G=\begin{bmatrix}
A&{}O&{}O&{}&{}O&{}B\\ B&{}A&{}O&{}\dots &{}O&{}O\\ O&{}B&{}A&{}&{}O&{}O\\ &{}\vdots &{}&{}\ddots &{}\vdots \\
O&{}O&{}O&{}\dots &{}A&{}O\\ O&{}O&{}O&{}\dots &{}B&{}A\\ \end{bmatrix} \end{aligned}$$ (12) where the matrixes _A_ and _B_ are the \(n\times n\)
matrixes as shown below: $$\begin{aligned} A=\begin{bmatrix} 0&{}1&{}0&{}\dots &{}0\\ 0&{}0&{}1&{}&{}0\\ &{}\vdots &{}&{}\ddots &{}\vdots \\
0&{}0&{}0&{}\dots &{}1\\ 0&{}0&{}0&{}&{}0\\ \end{bmatrix}; B=\begin{bmatrix} 1&{}0&{}0&{}\dots &{}0\\ 0&{}0&{}0&{}&{}0\\
&{}\vdots &{}&{}\ddots &{}\vdots \\ 0&{}0&{}0&{}\dots &{}0\\ 0&{}0&{}0&{}&{}0\\ \end{bmatrix}. \end{aligned}$$ (13) Similarly, the network can
be expanded for different numbers of players and slots. As an example of expanding the situation, the network corresponding to the expanded three-player, three-slot situation is shown in
Fig. 8a. We simulate the decision-making for this expanded situation numerically. In this network, Laser _j_A, Laser _j_B, and Laser _j_C are assigned to Player _j_ (\(j=1, 2, 3\)), and
Laser 1_k_, Laser 2_k_, and Laser3_k_ are assigned to Slot _k_ (\(k=\)A, B, C). In this network, the selection of each player would be decided based on leader–laggard relationships among
each player’s three lasers, like a ring configuration. Decision-making by a laser network in a ring configuration has already been established42. Referring to this, the STCC in lasers
assigned to each player is defined similarly to Eqs. (14)–(16) as follows \((j=1, 2, 3)\): $$\begin{aligned} C_{j\textrm{A}}(t)&=\frac{\langle [I_{j\textrm{C}}(t-\tau
)-\bar{I}_{j\textrm{C}}][I_{j\textrm{A}}(t)-\bar{I}_{j\textrm{A}}]\rangle _\tau }{\sigma _{j\textrm{C}}\sigma _{j\textrm{A}}}, \end{aligned}$$ (14) $$\begin{aligned}
C_{j\textrm{B}}(t)&=\frac{\langle [I_{j\textrm{A}}(t-\tau )-\bar{I}_{j\textrm{A}}][I_{j\textrm{B}}(t)-\bar{I}_{j\textrm{B}}]\rangle _\tau }{\sigma _{j\textrm{A}}\sigma _{j\textrm{B}}},
\end{aligned}$$ (15) $$\begin{aligned} C_{j\textrm{C}}(t)&=\frac{\langle [I_{j\textrm{B}}(t-\tau )-\bar{I}_{j\textrm{B}}][I_{j\textrm{C}}(t)-\bar{I}_{j\textrm{C}}]\rangle _\tau }{\sigma
_{j\textrm{B}}\sigma _{j\textrm{C}}}. \end{aligned}$$ (16) \(C_{jk} (k=\textrm{A}, \textrm{B}, \textrm{C})\) represents the cross-correlation value when Laser _jk_ is considered as the
laggard over the short-term period \(\tau\), for example, \(C_{\textrm{1B}}(t)\) considers Laser 1B lagging behind Laser 1A. Consequently, among lasers assigned to each player, the one
having the minimum STCC value is the leader laser. For example, if \(C_{\textrm{1A}}\) is smaller than \(C_{\textrm{1B}}\) and \(C_{\textrm{1C}}\), Laser 1A is the leader among Lasers 1A,
1B, and 1C, and other cases are also true. Parameter values used are summarized in Table 1 in the Methods section. Players’ selections are every 1 ns, which is the same as the numerical
simulation, corresponding to 5 identical selections in the duration of the switching of the leader. In each cycle, Slots A, B, and C payout rewards of 1 with probabilities of 0.6, 0.3, and
0.1, respectively. Figure 8b displays the selection made by each player in one cycle, while Fig. 8c displays the averaged accumulated reward of each player and team, and Fig. 8d displays the
averaged conflict rate between players over 10 cycles. The conflict among the three players is completely avoided, and team or player rewards are maximized. By switching selections of
players, each player receives rewards almost equally, although the probabilities of slots are biased. If three players make decisions independently, the expected conflict rate is about 77%,
and the expected rewards of the team and each player are about 56 and 18, respectively. The expected conflict rate would grow, and the expected rewards of the team would decrease with
independent selection as the number of players increases. Thus, the effect of this conflict-free principle is also more significant in expanded situations. Thus, this system works well in
extended situations. As mentioned earlier, it is possible to implement this expanded system experimentally by devising a way to align the length of each injection coupling. Of course, as _n_
increases, the number of lasers and injection paths required increases to \(n\times n\). To alleviate the increased physical resource requirements in implementation, using surface emitting
lasers or laser arrays and taking an optical integration approach can be considered. Optical integration also reduces the length of the optical injection path, which has the advantage of
shortening the switching period corresponding to the transmission delay time tau, thereby reducing the time required to perform the search20. In addition to the cases mentioned above, we
consider this system possible to extend to situations where the number of players and slots are not the same. In such a situation, combined conflict avoidance with the effective exploration
demonstrated in the previous study20, reward maximization would be achieved. CONCLUSION In this research, we have proposed a cooperative decision-making system and have confirmed its
applicability. In the numerical simulations, the averaged accumulated rewards of Player 1, Player 2, and the team are 50.4, 50.3, and 100.7, respectively. When the players make decisions
fully cooperatively with no conflict, the expected reward for each player is 50, and for the team is 100. The numerical simulation achieved this theoretical maximum reward. When players make
decisions independently, the expected reward for each player is 37.5, for the team is 75, and the expected conflict rate is 0.5. The conflict rate and reward improved significantly thanks
to the proposed cooperative mechanism. This demonstrates the usefulness of the proposed system numerically. In the experimental setup, the averaged accumulated rewards of Player 1, Player 2,
and the team are 38.0, 57.7, and 95.8, respectively, with an average conflict rate of 0.085. In the comparative experiment with independently coupled lasers corresponding to the
non-cooperative decision-making, the averaged accumulated rewards of Player 1, Player 2, and the team are 35.4, 44.2, and 79.7, respectively, with an average conflict rate of 0.60. These
results confirm the superiority of our system. Furthermore, this system can be expanded to situations with more players and slots. Network expansion is theoretically generalized. In the
three-player, three-armed situation, perfect conflict-free decision-making is also achieved numerically, and the averaged accumulated rewards of Player 1, Player 2, Player 3, and the team
are 31.4, 33.9, 35.4, and 100.7, respectively. There are still issues that need to be resolved to fully realize our system’s numerical and theoretical excellent performance in the
experimental setup. All propagation delay times of injection paths presumably should be matched more than the current situation for experimental performance and stability. We believe that
this issue can be solved technically, and we expect that this system will be further expanded and realized in the experimental system in the future. A series of studies on decision-making in
laser networks has special significance in research on chaotic lasers. In many examples of applied research so far, the chaotic laser has played a role similar to a signal generator, such
as in physical random number generation34 and secure key generation37, or a converter, such as in reservoir computing7. Therefore, the chaotic laser system was insensitive to the application
in both system and dynamics. However, in decision-making using laser networks20,42 and multimode lasers22, the laser system can be directly changed by the result of decision-making. In
other words, the laser system will be applied to a decision-making environment. On the other hand, photonic decision-making seems to be one of the applications of controlling chaos48 because
decision-making controls laser systems. We hope these decision-making studies will reboot research related to controlling chaos, and usher in the dawn of adaptive physical systems in not
only chaotic laser but also light research. METHODS DETAILS OF NUMERICAL EXPERIMENTS The parameters of the numerical simulation are described in Table 1. The parameters are determined based
on references20,39,42. \(\Delta f_{\textrm{ini}}\) refers to the initial optical frequency detuning of each laser from the frequency of Laser 1A, \(f_{1A}=c/\lambda _{1A}\). DETAILS OF
EXPERIMENTS Details of the experimental equipment are described in Table 2. In this research, semiconductor lasers have no isolator. This feature allows light to be injected into the laser
from another laser. In our network, two types of fiber couplers are used, with light split ratios of 90:10 and 50:50. The coupler adjacent to each laser has a 90:10 split, and 10% of the
lasers output is sent to the oscilloscope via an isolator and a photoreceiver. The couplers coordinating the injection paths have a 50:50 split. The type of semiconductor laser is a
distributed-feedback semiconductor laser. The threshold injection current value and actual injection current value of each laser used in the experiment are shown in Table 3. DATA
AVAILABILITY The data that support the plots within this thesis are available from H.I. upon reasonable request. REFERENCES * Moore, G. E. Cramming more components onto integrated circuits.
_Proc. IEEE_ 86, 82–85 (1998). Article Google Scholar * Mehonic, A. & Kenyon, A. J. Brain-inspired computing needs a master plan. _Nature_ 604, 255–260 (2022). Article ADS CAS
PubMed Google Scholar * Waldrop, M. M. The chips are down for Moore’s law. _Nat. News_ 530, 144 (2016). Article CAS Google Scholar * Kitayama, K. _et al._ Novel frontier of photonics
for data processing—photonic accelerator. _APL Photon._ 4, 090901 (2019). Article ADS Google Scholar * Zhou, H. _et al._ Photonic matrix multiplication lights up photonic accelerator and
beyond. _Light Sci. Appl._ 11, 30 (2022). Article ADS PubMed PubMed Central Google Scholar * Feldmann, J. _et al._ Parallel convolutional processing using an integrated photonic tensor
core. _Nature_ 589, 52–58 (2021). Article ADS CAS PubMed Google Scholar * Larger, L. _et al._ Photonic information processing beyond turing: An optoelectronic implementation of
reservoir computing. _Opt. Express_ 20, 3241–3249 (2012). Article ADS CAS PubMed Google Scholar * Brunner, D., Soriano, M. C., Mirasso, C. R. & Fischer, I. Parallel photonic
information processing at gigabyte per second data rates using transient states. _Nat. Commun._ 4, 1–7 (2013). Article Google Scholar * Wagner, K. & Psaltis, D. Multilayer optical
learning networks. _Appl. Opt._ 26, 5061–5076. https://doi.org/10.1364/AO.26.005061 (1987). Article ADS CAS PubMed Google Scholar * De Marinis, L., Cococcioni, M., Castoldi, P. &
Andriolli, N. Photonic neural networks: A survey. _IEEE Access_ 7, 175827–175841. https://doi.org/10.1109/ACCESS.2019.2957245 (2019). Article Google Scholar * Sunada, S. & Uchida, A.
Photonic neural field on a silicon chip: Large-scale, high-speed neuro-inspired computing and sensing. _Optica_ 8, 1388–1396 (2021). Article ADS CAS Google Scholar * Ohno, S., Tang, R.,
Toprasertpong, K., Takagi, S. & Takenaka, M. Si microring resonator crossbar array for on-chip inference and training of the optical neural network. _ACS Photon._ 9, 2614–2622 (2022).
Article CAS Google Scholar * Shastri, B. J. _et al._ Photonics for artificial intelligence and neuromorphic computing. _Nat. Photon._ 15, 102–114 (2021). Article ADS CAS Google Scholar
* Flamini, F. _et al._ Photonic architecture for reinforcement learning. _New J. Phys._ 22, 045002 (2020). Article ADS MathSciNet Google Scholar * Bueno, J. _et al._ Reinforcement
learning in a large-scale photonic recurrent neural network. _Optica_ 5, 756–760 (2018). Article ADS Google Scholar * Inagaki, T. _et al._ A coherent ising machine for 2000-node
optimization problems. _Science_ 354, 603–606. https://doi.org/10.1126/science.aah4243 (2016). Article ADS CAS PubMed Google Scholar * Naruse, M. _et al._ Single-photon decision maker.
_Sci. Rep._ 5, 1–9 (2015). Article Google Scholar * Naruse, M., Terashima, Y., Uchida, A. & Kim, S.-J. Ultrafast photonic reinforcement learning based on laser chaos. _Sci. Rep._ 7,
1–10 (2017). Article ADS CAS Google Scholar * Homma, R. _et al._ On-chip photonic decision maker using spontaneous mode switching in a ring laser. _Sci. Rep._ 9, 1–9 (2019). Article ADS
Google Scholar * Mihana, T. _et al._ Decision making for the multi-armed bandit problem using lag synchronization of chaos in mutually coupled semiconductor lasers. _Opt. Express_ 27,
26989–27008 (2019). Article ADS PubMed Google Scholar * Morijiri, K. _et al._ Parallel photonic accelerator for decision making using optical spatiotemporal chaos. _Optica_ 10, 339–348.
https://doi.org/10.1364/OPTICA.477433 (2023). Article ADS Google Scholar * Iwami, R. _et al._ Controlling chaotic itinerancy in laser dynamics for reinforcement learning. _Sci. Adv._ 8,
eabn8325. https://doi.org/10.1126/sciadv.abn8325 (2022). Article PubMed PubMed Central Google Scholar * Robbins, H. Some aspects of the sequential design of experiments. _Bull. Am. Math.
Soc._ 58, 527–536 (1952). Article MathSciNet Google Scholar * Sutton, R. S. & Barto, A. G. _Reinforcement Learning: An Introduction_ (MIT Press, ***, 1998). Google Scholar * Auer,
P., Cesa-Bianchi, N. & Fischer, P. Finite-time analysis of the multiarmed bandit problem. _Mach. Learn._ 47, 235–256 (2002). Article Google Scholar * Daw, N. D., O’doherty, J. P.,
Dayan, P., Seymour, B. & Dolan, R. J. Cortical substrates for exploratory decisions in humans. _Nature_ 441, 876–879 (2006). Article ADS CAS PubMed PubMed Central Google Scholar *
Naruse, M. _et al._ Scalable photonic reinforcement learning by time-division multiplexing of laser chaos. _Sci. Rep._ 8, 1–16 (2018). Google Scholar * Homma, R. _et al._ On-chip photonic
decision maker using spontaneous mode switching in a ring laser. _Sci. Rep._ 9, 9429 (2019). Article ADS PubMed PubMed Central Google Scholar * Lai, L., El Gamal, H., Jiang, H. &
Poor, H. V. Cognitive medium access: Exploration, exploitation, and competition. _IEEE Trans. Mob. Comput._ 10, 239–253 (2010). Google Scholar * Akkarajitsakul, K., Hossain, E. &
Niyato, D. Distributed resource allocation in wireless networks under uncertainty and application of Bayesian game. _IEEE Commun. Mag._ 49, 120–127. https://doi.org/10.1109/MCOM.2011.5978425
(2011). Article Google Scholar * Chauvet, N. _et al._ Entangled-photon decision maker. _Sci. Rep._ 9, 1–14 (2019). Article CAS Google Scholar * Chauvet, N. _et al._ Entangled n-photon
states for fair and optimal social decision making. _Sci. Rep._ 10, 1–12 (2020). Article Google Scholar * Amakasu, T. _et al._ Conflict-free collective stochastic decision making by
orbital angular momentum of photons through quantum interference. _Sci. Rep._ 11, 1–13 (2021). Article Google Scholar * Uchida, A. _et al._ Fast physical random bit generation with chaotic
semiconductor lasers. _Nat. Photon._ 2, 728–732 (2008). Article ADS CAS Google Scholar * Sakuraba, R., Iwakawa, K., Kanno, K. & Uchida, A. Tb/s physical random bit generation with
bandwidth-enhanced chaos in three-cascaded semiconductor lasers. _Opt. Express_ 23, 1470–1490 (2015). Article ADS CAS PubMed Google Scholar * Argyris, A. _et al._ Chaos-based
communications at high bit rates using commercial fibre-optic links. _Nature_ 438, 343–346 (2005). Article ADS CAS PubMed Google Scholar * Koizumi, H. _et al._ Information-theoretic
secure key distribution based on common random-signal induced synchronization in unidirectionally-coupled cascades of semiconductor lasers. _Opt. Express_ 21, 17869–17893 (2013). Article
ADS PubMed Google Scholar * Heil, T., Fischer, I., Elsässer, W., Mulet, J. & Mirasso, C. R. Chaos synchronization and spontaneous symmetry-breaking in symmetrically delay-coupled
semiconductor lasers. _Phys. Rev. Lett._ 86, 795–798 (2001). Article ADS CAS PubMed Google Scholar * Kanno, K., Hida, T., Uchida, A. & Bunsen, M. Spontaneous exchange of
leader-laggard relationship in mutually coupled synchronized semiconductor lasers. _Phys. Rev. E_ 95, 052212 (2017). Article ADS PubMed Google Scholar * Sano, T. Antimode dynamics and
chaotic itinerancy in the coherence collapse of semiconductor lasers with optical feedback. _Phys. Rev. A_ 50, 2719 (1994). Article ADS CAS PubMed Google Scholar * Ohtsubo, J.
_Semiconductor Lasers and Theory_ (Springer, ***, 2013). Book Google Scholar * Mihana, T., Fujii, K., Kanno, K., Naruse, M. & Uchida, A. Laser network decision making by lag
synchronization of chaos in a ring configuration. _Opt. Express_ 28, 40112–40130 (2020). Article ADS PubMed Google Scholar * Nixon, M. _et al._ Synchronized cluster formation in coupled
laser networks. _Phys. Rev. Lett._ 106, 223901 (2011). Article ADS PubMed Google Scholar * Nixon, M. _et al._ Controlling synchronization in large laser networks. _Phys. Rev. Lett._ 108,
214101 (2012). Article ADS PubMed Google Scholar * Ohtsubo, J., Ozawa, R. & Nanbu, M. Synchrony of small nonlinear networks in chaotic semiconductor lasers. _Jpn. J. Appl. Phys._
20, 072702 (2015). Article ADS Google Scholar * Fischer, I. _et al._ Zero-lag long-range synchronization via dynamical relaying. _Phys. Rev. Lett._ 97, 123902 (2006). Article ADS PubMed
Google Scholar * Lang, R. & Kobayashi, K. External optical feedback effects on semiconductor injection laser properties. _IEEE J. Quantum Electron._ 16, 347–355 (1980). Article ADS
Google Scholar * Ott, E., Grebogi, C. & Yorke, J. A. Controlling chaos. _Phys. Rev. Lett._ 64, 1196 (1990). Article ADS MathSciNet CAS PubMed Google Scholar Download references
ACKNOWLEDGEMENTS The authors thank A. Roehm for discussions about laser networks. This research was funded in part by the Japan Science and Technology Agency through the Core Research for
Evolutionary Science and Technology (CREST) Project (JPMJCR17N2), and in part by the Japan Society for the Promotion of Science through Grant-in-Aid for Research Activity Start-up
(22K21269), and Grant-in-Aid for Early-Career Scientists (23K16961), Grants-in-Aid for Scientific Research (A) (JP20H00233) and Transformative Research Areas (A) (JP22H05197). AUTHOR
INFORMATION AUTHORS AND AFFILIATIONS * Department of Information Physics and Computing, Graduate School of Information Science and Technology, The University of Tokyo, 7-3-1 Hongo,
Bunkyo-ku, Tokyo, 113-8656, Japan Hisako Ito, Takatomo Mihana, Ryoichi Horisaki & Makoto Naruse Authors * Hisako Ito View author publications You can also search for this author inPubMed
Google Scholar * Takatomo Mihana View author publications You can also search for this author inPubMed Google Scholar * Ryoichi Horisaki View author publications You can also search for
this author inPubMed Google Scholar * Makoto Naruse View author publications You can also search for this author inPubMed Google Scholar CONTRIBUTIONS T.M. conceived the numerical simulation
and the experiment, H.I. conducted the numerical simulation and the experiment, H.I., T.M., and M.N. analyzed the results. All authors discuss the results, H.I. wrote the manuscript, and
all authors reviewed the manuscript. CORRESPONDING AUTHOR Correspondence to Hisako Ito. ETHICS DECLARATIONS COMPETING INTERESTS The authors declare no competing interests. ADDITIONAL
INFORMATION PUBLISHER'S NOTE Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations. RIGHTS AND PERMISSIONS OPEN ACCESS
This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as
long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third
party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the
article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the
copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/. Reprints and permissions ABOUT THIS ARTICLE CITE THIS ARTICLE Ito, H., Mihana, T.,
Horisaki, R. _et al._ Conflict-free joint decision by lag and zero-lag synchronization in laser network. _Sci Rep_ 14, 4355 (2024). https://doi.org/10.1038/s41598-024-54491-1 Download
citation * Received: 21 June 2023 * Accepted: 13 February 2024 * Published: 22 February 2024 * DOI: https://doi.org/10.1038/s41598-024-54491-1 SHARE THIS ARTICLE Anyone you share the
following link with will be able to read this content: Get shareable link Sorry, a shareable link is not currently available for this article. Copy to clipboard Provided by the Springer
Nature SharedIt content-sharing initiative